Vigilant

Une solution de maintenance prévisionnelle clé en main qui combine la polyvalence des ultrasons, l’analyse vibratoire, les protocoles de communication standard et un logiciel intégré d’analyse et de suivi des tendances.
Configurez Vigilant pour toutes vos machines critiques
Vigilant est un module de collecte de données flexible. Utilisez une combinaison de 8 capteurs ultrasonores et vibratoires et suivez l’état de vos machines en continu. Ses 4 voies pour la température, la tachymétrie et la pression en font la solution tout-en-un pour les machines critiques sous surveillance.
Les points forts de Vigilant :
- 8 voies (ultrasons et vibrations)
- 4 voies (temp/tachy/processus)
- Logiciel de gestion des données intégré
- Tendances/spectre/signal temporel/cascade
- Protocole de communication ouvert
- Données statiques et dynamiques
Conçu pour CONMONSense
Vigilant accepte les données des capteurs les plus courants, notamment les capteurs CONMONSense de SDT, conçus pour produire des mesures précises et répétitives dans tous types d’environnements industriels.


Logiciel de gestion des données intégré
Consultez l’état de vos machines en toute sécurité depuis votre navigateur Web préféré.

 Configuration
Configuration
Vigilant est doté d’une interface Web qui permet de configurer toutes les options du système et toutes les fonctionnalités de surveillance disponibles sur les appareils.
 Journal d’alarmes
Journal d’alarmes
Sur tous les bureaux, les utilisateurs ont accès au « Journal des alarmes » qui indique tous les événements ou anomalies détectés en temps réel dans les machines protégées.
 Widgets
Widgets
Widgets pour tendances statiques, tracés de signaux temporels dynamiques et analyse spectrale.
 Mise en page
Mise en page
Dimensionnez, positionnez et disposez les widgets pour créer des mises en page personnalisées de votre bureau.
 Tableau de bord
Tableau de bord
Le tableau de bord permet de visualiser en temps réel les mesures réalisées par Vigilant. Il présente également l’historique des données enregistrées dans l’appareil.
Applications
- Détection précoce des défauts de roulements (en particulier dans les machines à vitesse lente);
- État des accouplements sur les machines critiques situées dans des emplacements difficiles d’accès;
- Surveillance des machines comme les robots ou les centres de machines-outils à commande numérique;
- État de lubrification des roulements;
- Vannes jugées essentielles pour un procédé ;
- Détection des décharges partielles dans les équipements électriques comme les panneaux des centres de commande, des moteurs et les armoires de tableaux de distribution;
- Détection des frottements ou des impacts dans les machines à mouvement linéaire;
- Détection des turbulences produites par la cavitation dans les pompes et les vannes;
- Détection des hydrocyclones dans les procédés d’extraction minière.


Vigilant Permanent

- 8 entrées analogiques universelles grande vitesse (dynamiques) ;
- 4 voies (temp/tachy/processus) ;
- Source d’alimentation ICP disponible sur toutes les entrées dynamiques ;
- Communications Ethernet TCP/IP ;
- Alimentation +24 Vcc.
Vigilant Mobility

- Même fonctionnement que Vigilant Permanent ;
- Livré dans dans une valise robuste, personnalisée et étanche ;
- Conçu pour les déplacements sur les équipements hors site ;
- Installation sur les machines en état d’alarme pour une surveillance renforcée avant l’arrêt programmé.



| Généralités | |
| Fonction | Système d’acquisition multicanal |
| Principales entrées dynamiques | 8 voies (ultrasons et vibrations) |
| Entrées statiques auxiliaires | 4 voies (statiques et tachymétriques) |
| Ports USB | 1 hôte |
| Voyants des voies analogiques | 13x RGB LED |
| Alimentation | 20-26 Vcc, 24 Vcc tension nominale (220 V AC avec la mobility case) |
| Consommation électrique | <12W |
| Caractéristiques du système | |
| Système d’exploitation | Application de serveur web local intégrée |
| CPU | ARM Cortex™-A9 Quad Core (NVIDIA® Tegra™ 3) |
| Capacité de stockage | 4 GB |
| Interface réseau | IEEE1588 Ethernet 10/100 (réseau Wi-Fi/cellulaire avec module en option) |
| Communication | MODBUS TCP/IP (client et/ou serveur) & OPC UA (option) |
| Caractéristiques mécaniques | |
| Montage | Rail DIN standard 35 mm (valise de transport plug&play en option) |
| Interface de capteur | Bornier enfichable à 3 pôles fourni avec l’appareil |
| Dimensions | Lxlxh: 162x95x27 mm / ~6.38×3.74×1.06 in |
| Poids | 0.55 kg / ~19.4 oz |
| Plage de température de fonctionnement | -30 C° à +44.5 C° / -22 à 111.2 °F,, sans condensation |
| Humidité | 95% RH |
| Acquisition du signal: Principales entrées | |
| Vitesse d’échantillonnage | Jusqu’à 51 200 Hz |
| Gamme CC | ± 24 V |
| Gamme AC | 24 Vpp |
| Courant d’attaque des capteurs IEPE | 5.5 mA @20V |
| Résolution CAN | 16 bits |
| Mode de configuration des entrées | Dynamique, statique, numérique, train d’impulsions |
| Distorsion harmonique | -70 dB |
| Précision | 1 % |
| Dynamique | 110 dB |
| Gain | 1 to 128 |
| Type de point | Dynamique, statique, tachymètre |
| Acquisition du signal: Entrées auxiliaires | |
| Vitesse d’échantillonnage | Jusqu’à 200 Hz |
| Gamme DC | ± 24 V |
| Résolution CAN | 16 bits |
| Tension de sortie | +24 V |
| Modes de configuration des entrées | Statique, numérique, train d’impulsions (A1 et A2 uniquement) |
| Précision | 1 % |
| Gain | 0 à 30 dB, gamme de +6 |
| Type de point | Statique, tachymètre (A1 et A2 uniquement) |
| Traitement du signal | |
| Raies spectrales | Jusqu’à 12 800 |
| Échantillons de signal temporel | de 128 à 262 016 |
| Type de fenêtre | Hann, Hamming, Blackman, Rectangulaire |
| Modes de traitement | Signal temporel, spectre et signal temporel, démodulation, signal temporel long, démodulation, order tracking |
| Filtres disponibles | Butterworth, Bessel, Chebyshev |
| Autre | |
| Garantie | 24 mois |


Vigilant Permanent
- 8 entrées analogiques universelles grande vitesse (dynamiques) ;
- 4 voies (temp/tachy/processus) ;
- Source d’alimentation ICP disponible sur toutes les entrées dynamiques ;
- Communications Ethernet TCP/IP ;
- Alimentation +24 Vcc.
Vigilant Mobility
- Même fonctionnement que Vigilant Permanent ;
- Livré dans dans une valise robuste, personnalisée et étanche ;
- Conçu pour les déplacements sur les équipements hors site ;
- Installation sur les machines en état d’alarme pour une surveillance renforcée avant l’arrêt programmé.
CONMONSense RSV (capteur 0-10 V) FAQ
Veuillez noter que le capteur nécessite une source d’alimentation 24 VCC externe capable de fournir au minimum 40 mA.
Câblage des capteurs CONMONSense :
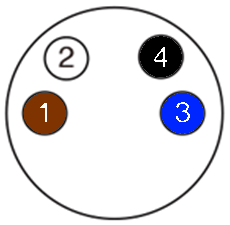
1 = Alimentation 24 VCC (+)
2 = Tension de sortie (Vout)
3 = 0 V (-)
4 = Ligne de communication (doit être laissée flottante si elle n’est pas utilisée)
Si votre système dispose d’une entrée de tension analogique 0-10 V dédiée, le câblage suivant est possible :
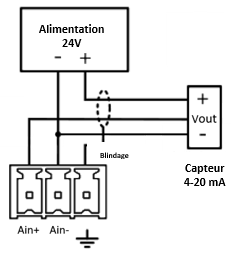
Veuillez noter que ce câblage n’est indiqué qu’à titre d’exemple. Il convient de consulter la documentation technique de votre système pour s’assurer de réaliser un câblage adapté à votre installation.
Mode statique:

Équation pour chaque amplification :
![]()
Exemple : une tension de sortie de 5 [V] résulte d’une tension de sortie de capteur de (5 / 25) = 0,2 [V] ou 200 [mV] ou 106 [dB]µV
![]()
Exemple : une tension de sortie de 5 [V] résulte d’une tension de sortie de capteur de (5 / 100) = 0,05 [V] ou 50 [mV] ou 94 [dB]µV
![]()
Exemple : une tension de sortie de 5 [V] résulte d’une tension de sortie de capteur de (5 / 400) = 0,0125 [V] ou 12,5 [mV] ou 82 [dB]µV
![]()
Exemple : une tension de sortie de 5 [V] résulte d’une tension de sortie de capteur de (5 / 1 575) = 0,0032 [V] ou 3,2 [mV] ou 70 [dB]µV
![]()
Exemple : une tension de sortie de 5 [V] résulte d’une tension de sortie de capteur de (5 / 6 275) = 0,0008 [V] ou 0,8 [mV] ou 58 [dB]µV
![]()
Exemple : une tension de sortie de 5 [V] résulte d’une tension de sortie de capteur de (5 / 25 000) = 0,0002 [V] ou 0,2 [mV] ou 46 [dB]µV
Mode dynamique:

Équation pour chaque amplification :
![]()
Exemple : une tension de sortie dynamique de 1 [V] résulte d’une tension de sortie de capteur de (1 / 1,2) = 0,833 [V] ou 833 [mV] ou 118,3 [dB]µV
![]()
Exemple : une tension de sortie dynamique de 1 [V] résulte d’une tension de sortie de capteur de (1 / 4,8) = 0,208 [V] ou 208 [mV] ou 106,3 [dB]µV
![]()
Exemple : une tension de sortie dynamique de 1 [V] résulte d’une tension de sortie de capteur de (1 / 19,2) = 0,0521 [V] ou 52,1 [mV] ou 94,3 [dB]µV
![]()
Exemple : une tension de sortie dynamique de 1 [V] résulte d’une tension de sortie de capteur de (1 / 75,6) = 0,0132 [V] ou 13,2 [mV] ou 82,3 [dB]µV
![]()
Exemple : une tension de sortie de 1 [V] résulte d’une tension de sortie de capteur de (1 / 301,2) = 0,0033 [V] ou 3,3 [mV] ou 70,3 [dB]µV
![]()
Exemple : une tension de sortie de 1 [V] résulte d’une tension de sortie de capteur de (1 / 1 200) = 0,00083 [V] ou 0,83 [mV] ou 58,3 [dB]µV
Veuillez noter que le mode dynamique est une sortie alternative (CA) avec une composante continue (CC) de 3 [V]. Une sortie dynamique de 1 V signifie 3 V DC + 1 V AC
Afin de modifier l’amplification interne des capteurs ou de basculer entre le mode statique et le mode dynamique, il est nécessaire d’établir une communication entre l’automate et le capteur.
Utilisation d’une sortie numérique
Si votre automate est équipé d’un module de sortie numérique, vous pouvez connecter l’une des sorties du capteur à la ligne de communication selon le schéma suivant :
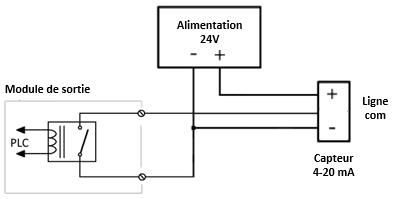
Il suffit ensuite de générer des impulsions conformément à la fiche technique CONMONSense pour modifier l’amplification ou le mode.
Utilisation d’une communication série
Il est également possible de communiquer à l’aide d’une communication série présentant les spécifications suivantes :
- Protocole : UART
- Débit en bauds : 9 600 bauds/s
- Bits de données : 8
- Parité : paire
- Bit d’arrêt : 1
Les capteurs CONMONSense utilisent un protocole propriétaire décrit dans la fiche technique.
La meilleure façon de mettre en place un contrôle de l’amplification est de suivre ces quelques règles simples :
Mode statique
- Si la tension de sortie (CC) est supérieure à 5 [V] à diminuer l’amplification d’un degré (12 [dB])
- Si la tension de sortie (CC) est inférieure à 1 [V] à augmenter l’amplification d’un degré (12 [dB])
Mode dynamique
- Si le pic du signal est supérieur à 4,5 [V] (ou 1,5 [V] si la composante continue est supprimée) à diminuer l’amplification d’un degré (12 [dB])
- Si le pic du signal est inférieur à 3,5 [V] (ou 0,5 [V] si la composante continue est supprimée) à augmenter l’amplification d’un degré (12 [dB])
Veuillez noter que le mode dynamique est une sortie alternative (CA) avec une composante continue (CC) de 3 [V].



